This article is part of a set of three; the common factor is Calculus of Variations. In classical physics Calculus of Variations is applied in three areas: Optics, Statics, and Dynamics. Discussion of application in statics is included in the 'Foundation' article.
The other two articles:
| Foundation: | Calculus of Variations | |
| Optics: | Fermat's stationary time |
I recommend to first absorb the contents of the 'Calculus of Variations' article.
The Energy-Position equation
1. From F = ma to the Work-Energy theorem
2. From Work-Energy to stationary action
3. Trial trajectories: response to variation
3.1 Potential increases linear with height
3.2 Potential increases quadratic with displacement
3.3 Potential increases proportional to cube of displacement
Appendix I The meaning of stationary
Appendix II Jacob's Lemma
This exposition is about Hamilton's stationary action. The usual presentation is to posit Hamilton's stationary action, and to proceed with showing that F = ma can be recovered from it.
However, it is also possible to proceed in the other direction. You can start with F = ma, and in a series of steps proceed to Hamilton's stationary action. The development is in two stages:
- Derivation of the Work-Energy theorem from F = ma
- Demonstration that in cases where the Work-Energy theorem holds good Hamilton's stationary action will hold good also.
The Work-Energy theorem and Hamilton's stationary action have the following in common: the physics taking place is described in terms of kinetic energy and potential energy.
Interactive diagrams
The intention of this article is to let the interactive diagrams tell the story. You can choose to jump ahead to the interactive diagrams However, I strongly recommend you return to these paragraphs at some point; for overall understanding they are necessary.
Requirement for well defined potential energy
Given a particular force: in order to have a well defined expression for potential energy the force must have the property that the work done in moving from some point A to some point B is independent of the path taken between the two points. The validity of energy mechanics is limited to forces with that property.
(It may be that in terms of a deeper theory such as quantum physics all interactions actually have that potential-is-independent-of-the-path property, but we should not blindly assume that.)
As we know: the principle of conservation of energy is asserted without any restriction. That's why the concept is referred as a 'principle', it is a blanket statement.
The discussion in this article avoids the blanket statement. The discussion in this article is limited to the classes of cases where by way of experimental corroboration it is evident that the work done in moving from some point A to some point B is independent of the path taken between the two points.
1. From F = ma to the Work-Energy theorem
In preparation for deriving the work-energy theorem we first derive a kinematical relation between the integral of acceleration with respect to position, and velocity.
In the course of the derivation the following two relations will be used:


Let a represent an arbitrary acceleration profile. We set up integration of this acceleration profile from a starting point s0 to a final point s
Intermediary step: change of the differential according to (1.1), with corresponding change of limits.
Change the order of the factors a and v:
Change of the differential according to (1.2), with corresponding change of limits.
So we have:
I want to emphasize just how general the validity of (1.7) is: it follows from the definitions (1.1) and (1.2) and the mathematics of differentiation/integration. That is: (1.7) obtains mathematically, independent from any physics.
The Work-Energy theorem
We start with the force-acceleration principle:
Specify integration with respect to the position coordinate:
Use (1.7) to process the right hand side. The result is the work-energy theorem:
The work-energy theorem motivates the definitions of potential energy and kinetic energy.
Historically: for several centuries, from the time of Huygens to the time of Hamilton, the concept of 'living force' was used, which was defined as mv². It was in the 1850's that the physics community shifted to a new name and a new definition: ½mv². The benefit of that shift: by defining kinetic energy as an integral (integral of ma with respect to the position coordinate) the concept of kinetic energy is defined in terms of the work-energy theorem.
To emphasize the structure of the Work-Energy theorem I give the elements arranged in a table. In each row the statement follows mathematically from the statements in the row(s) above it.
|
|
|
|
|
|
|||
|
|
|||
Potential energy
Historically the concept of potential energy arose before the work-energy theorem reached today's standard form. With the benefit of hindsight we recognize that the concept of potential energy capitalizes on the work-energy theorem.
Potential energy is defined as the negative of the left hand side of (1.9); the integral of force over distance.
In order for the potential energy to be well defined a specific condition must be met: the value of the integral from point s0 to point s must be independent of how the test object moves from point s0 to point s.
When the potential energy is well defined:

That is: with potential energy defined according to (1.10): when an object is moving down a potential gradient the kinetic energy will increase by the amount that the potential energy decreases. (With everything reversed when moving in the opposite direction, of course.)
(1.12) combines three statements. I present these three statements as a unit to emphasize the interconnection between them. While the statements are different mathematically, the physics content of these three is the same.
![\begin{array}{rcl}
F & = & ma \\[+10pt]
\int_{s_0}^s F \ ds & = & \tfrac{1}{2}mv^2 - \tfrac{1}{2}mv_0^2 \\[+10pt]
-\Delta E_p & = & \Delta E_k
\end{array}](../action_img/20211019_185500_690x301.png)
2. From Work-Energy to stationary action
2.1 Preparation: discussion of notation of Hamilton's stationary action and of the Euler-Lagrange equation.
Graphlet 2.1 sets out how in the diagrams on this page the variation is implemented. The grey line represents a true trajectory. To draw the trial trajectory in the diagram the value of the true trajectory is multiplied with the slider value.
The case depicted in the diagram is the following: an object is thrown upward, subject to a force such that the potential increases with the cube of the height. The initial velocity was tweaked to achieve that after two units of time the object is back to height zero. A potential that increases with the cube of the height is of course unlikely to occur in nature; I selected that potential because it enables vivid demonstration of the stationary action concept.
Application of variation
The potential energy is proportional to the cube of the height
In graphlet 2.1 a single slider has been implemented. That means that for the representation in graphlet 2.1 the variation space is a 1-dimensional space: the value of the slider.
(Providing granular control is possible: the graphlets in section 3 of this article have multiple sliders.)
Notice: as you move the slider the direction of the variation coincides with the direction of the position coordinate; the black dots move in the 'height' direction. The interactive diagram is implemented that way because that is how calculus of variations operates.
(If there is more than one degree of freedom then for each degree of freedom individual variation is applied.)
In preparation:
Hamilton's stationary action and dimensional analysis
(2.1.1) states the variational expression: the true trajectory has the property that the derivative of Hamilton's action with respect to variation is zero:
(2.1.1) follows the convention of using the greek lowercase \( \delta \) to express that the differentiation is with respect to applied variation.
About the Euler-Lagrange operator:
(2.1.2) states the general form, for application in mechanics, of the Euler-Lagrange differential operator, for a lagrangian \(L\)
With the Lagrangian \( (E_k-E_p) \) inserted in the Euler-Lagrange operator the operator is used to state an equation:
We have that in (2.1.3) two of the terms evaluate to zero anyway:
\(\tfrac{\partial E_k}{\partial s} = 0\), \(\tfrac{\partial E_p}{\partial v} = 0\)
For the remaining single differentiation: partial differentiation notation is superfluous:
\(\tfrac{\partial E_p}{\partial s} = \tfrac{d E_p}{d s}\) and \(\tfrac{\partial E_k}{\partial v} = \tfrac{d E_k}{dv} \)
Therefore:
\(\frac{\partial (E_k-E_p)}{\partial s} = \frac{d(-E_p)}{ds} \) and \(\frac{d}{dt}\frac{\partial (E_k-E_p)}{\partial v} = \frac{d}{dt}( \frac{dE_k}{dv}) \)The above relations combine to show that (2.1.3) simplifies to the expression below:
About the differential operations performed on the \(E_p\) term and \(E_k\) term respectively. It looks as if those differentiation operations are quite distinct, but that is not actually the case.
For one thing: in order for (2.1.4) as a whole to be self-consistent the differential operation that is performed on the \(E_k\) term must be dimensionally the same as the operation performed on the \(E_p\) term
In (2.1.5) the dimensionality of (2.1.4) is made explicit by stating the velocity coordinate \(v\) in the form \(\tfrac{ds}{dt}\)
In (2.1.6): dimensionally the two occurences of \(dt\) drop out of the differentiation. Further down we will return to this.
2.2 Differentation and Integration are each other's inverse
Differentiation with respect to position coordinate
We start with repeating (1.10), the work-energy theorem:
We have the fundamental theorem of Calculus: differentiation is the inverse of integration. In the derivation of the work-energy theorem we saw that integration of \(ma\) with respect to position coordinate \(s\) gives \(\tfrac{1}{2}mv^2\).
That is to say: it's a given that the differentiation specified in (2.2.2) will recover \(F=ma\)
About the expression below:
The left hand side is how (2.2.2) differentiates the quantity \(\tfrac{1}{2}mv^2\); the right hand side is how the Euler-Lagrange equation differentiates the quantity \(\tfrac{1}{2}mv^2\). Both sides evaluate to \(ma\), mass times acceleration.
(2.2.3) asserts that for \(\tfrac{1}{2}mv^2\) the two differentiations are equivalent.
Some preparation for asserting (2.2.3) was done with (2.1.6), the two operations are dimensionally the same. The circumstance that allows the sides to be equivalent is that position, velocity and acceleration are related by differentiation. Compare the progression from (1.3) to (1.7) The integration of acceleration with respect to position coordinate is transformed to a velocity integral.
(2.2.2) rearranges into the following form:
The equivalence expressed in (2.2.3) shows: inserting the Lagrangian \( (E_k-E_p) \) into the Euler-Lagrange differential operator gives an expression that differentiates the energy with respect to position coordinate.
I will refer to the form of (2.2.4) as 'the energy-position equation'; the energy is differentiated with respect to position coordinate.
In preparation for later: restatement in the following form:Put the two terms on the same side.
Allow the two minus signs to drop away against each other:
Allowing the two minus signs to drop away against each other gives the expression a cleaner look, but a disadvantage is that it hides the significance of the minus sign of \(-E_p\). The preparation above emphasizes the significance of the minus sign of \(-E_p\).
Diagram: response to applying variation
In the interactive diagram below: in the second panel Force and acceleration are represented. For simplicity the value of the mass \(m\) is set to one unit of mass, so that the value of the Force and the value of the acceleration are the same
As you sweep out variation: the true trajectory has the property that the magnitude of the acceleration is equal to the magnitude of the force.
As mentioned earlier, the case presented in the diagram is of a potential that increases with the cube of the height. When the object is still at very low height the force is very small, so in that part of the trajectory there is very little change in the slope of the trajectory. As the object climbs the force increases quadratically with height, resulting in a rapid turnaround.
Green bars: the magnitude of the accelerating force for the current state of the trial trajectory.
Red bars: the magnitude of the acceleration for the current state of the trial trajectory.
As you sweep out variation: the response of the acceleration magnituden is in linear proportion to the value of the variational parameter. Example: when you make the trial trajectory half the height of the true trajectory the acceleration magnitude is half as much. With the trial trajectory half as high the slope is half as steep, hence half as much change of velocity; half the amount of acceleration.
The green bars: in the case represented in the diagram the potential is proportional to the cube of the displacement, making the force proportional to the square of the height.
In variation sweep: as you move the slider value from 0.0 to 1.0 to 2.0:
- initially the green bars are smaller than the red bars
- there is a point where the green bars overtake the red bars
The diagram displays: when the trial trajectory coincides with the true trajectory the red bars and the green bars have matching height.
Porting the differentiation: from position coordinate to variation
In graphlet 2.2 the bottom panel displays change of the force and change of the acceleration as function of the applied variation. We can express force quantity and and acceleration quantity as the result of differentiating with respect to applied variation:
In (2.2.8) I used the notation \( \lvert \rvert\) to narrow down to the magnitude of the value. This is a temporary measure. For the time being: not having to keep track of minus signs is helpful.
I used the symbols \(F\) and \(ma\), but in (2.2.8) those symbols represent values along the trial trajectory. Those virtual values coincide with the true force and the true acceleration only at the point in variation space where the trial trajectory coincides with the true trajectory.
(2.2.9) states for potential energy how differentiation with respect to applied variation relates to differentiation with respect to position coordinate.
The relation is 1-on-1: for the potential energy the two differentiations have the same outcome.
(2.2.10) states how for kinetic energy the differentiations stand in relation to each other:
On why the two differentiations come out different in that way:
The differentiation with respect to position coordinate tracks the motion along the true trajectory; position coordinate and velocity are related by \(v = \tfrac{ds}{dt}\); the kinetic energy and the potential energy are connected quantities.
On the other hand, applied variation is a virtual change with no physical counterpart. The virtual change treats the potential energy and the kinetic energy as unconnected quantities.
For motion along the true trajectory: when moving against the potential gradient the kinetic energy decreases. Trial trajectory: shifting the trial trajectory in the direction against the potential gradient makes the trial trajectory steeper, hence larger hypothetical velocity, hence larger hypothetical kinetic energy.
Below side by side the relation in the case of differentiation with respect to position coordinate, and the relation in the case of differentiation with respect to applied variation:
While as explained above it is the nature of the kinetic energy differentiation that forces introducing a minus sign, by convention the minus sign is assigned to the potential energy term.
The minus sign being assigned to the potential energy term instead of to the kinetic energy term is a quirk of history.
To avoid misunderstanding: there is no right or wrong here; which term to subtract from the other is an arbitrary choice.
To identify the true trajectory: identify the point in variation space where the two terms are matching. When the two terms are matching the subtraction comes out zero either way - so it makes no difference.
Using the derivative with respect to variation as a proxy
As starting point: the expression for differentiation with respect to applied variation:
At the point in variation space where the trial trajectory coincides with the true trajectory (2.2.12) is satisfied.
It follows: for the purpose of finding the true trajectory (2.2.12) can be used as a proxy for (2.2.7).
Propagation to the integral
The following step is illustrated by the bottom panel of graphlet 2.2
In the graphlet: for visibility the red bars are spaced out to make room for the green bars, and likewise the green bars allow room for the red bars, but the idea is of course to think of each set of bars covering the area completely. I will refer to the respective fully covered areas as 'the red area' and 'the green area'.
The true trajectory has the property that everywhere along the trajectory the value of \(ma\) (red) is equal to the force (green).
It follows geometrically that the true trajectory has the following property: the red surface area is equal to the green surface area.
We can think of that equal surface area property as the validity of (2.2.12) propagating to time integrals.
In the diagram the points \(t_1\) and \(t_2\) are at \(t_1=-1\) and \(t_2=1\), but being pre-determined like that isn't a requirement; the property generalizes to any time interval \({(t_1, t_2)}\) that is an interval within the length of the trajectory.For any time interval \({(t_1, t_2)}\) we have:
Differentiation and integration are linear operations
Given that differentiation and integration are linear operations the integrations can be combined:
The differentiations can be combined:
At this point we already have the \(E_k\) term and the \(E_p\) term in the form of the Lagrangian \({(E_k - E_p)}\)
The following equivalence assertion expresses a specific instance of the Leibniz integral rule; the case where the limits of the integration are constants:
Exchanging the order of the differentiation and the integration has no effect on the outcome.
With the differentiation moved outside of the integration we have arrived at Hamilton's stationary action: the expression below is the right hand side of (2.2.16). It is the same as (2.1.1).
2.3 Overview: the elements that together constitute Hamilton's stationary action
The force-acceleration principle:
Given the definitions \(v=\tfrac{ds}{dt}\), \(a=\tfrac{dv}{dt}\) we have:
Combining with \(F=ma\):
Given that differentiation and integration are inverse operations we know that differentiation with respect to the position coordinate will recover \({F=ma}\):
Given that position, velocity and acceleration are defined in terms of the differential relations \({v=\tfrac{ds}{dt} \ \text{and} \ a=\tfrac{dv}{dt}}\): for \(s\), \(v\) and \(a\) these differentiation operations are equivalent:
Differentiation with respect to variation can be used as a proxy for differentiation with respect to position coordinate.
The validity of the is-satisfied-for-each-moment-in-time differential relation propagates to the time integral:
Given that differentiation and integration are linear operations: changing the order does not change the outcome:
Thus: Hamilton's stationary action.
2.4 Visual overview
Potential proportional to cube of height
Graphlet 2.3 extends graphlet 2.2, adding two panels.
The third panel: plots of the energy as a function of time, in accordance with the value of the variational parameter \(p\).
The fourth panel:
- red curve: \(\int E_k dt\), integral of the kinetic energy, as a function of \(p\)
- green curve: \(\int E_p dt\), integral of minus potential energy, as a function of \(p\)
- blue curve: \(\int (E_k - E_p) dt\), integral of the Lagrangian \( (E_k-E_p)\), as a function of \(p\)
At the point in variation space where the trial trajectory coincides with the true trajectory the derivative of \(\int (E_k - E_p) dt\) wrt the variation parameter \(p\) is zero.
Notice that the criterion is: derivative-is-zero.
Whether that derivative-is-zero point is a minimum or a maximum is of no relevance; it plays no part in the physics taking place.
3. Trial trajectories: response to variation
The following three graphlets are three instances of the same graphlet, for three successive classes of cases.
As you manipulate the sliders: the process to home in on the true trajectory is to manipulate the trial worldline such that over the entire trajectory the slope of the kinetic energy curve (red) matches the slope of the potential energy curve (green). When the trial trajectory is at thet the point in variation space such that those two slopes match the derivative of Hamilton's action is zero.
3.1 Potential increases linear with height
Potential energy increases linear with height; the trajectory is a parabola
Graphlet 3.1 is for the case of a uniform force, causing an acceleration of 2 m/s2.
As we know: with a uniform force the curve that represents the height as a function of time is a parabola.
In the 'energy' sub-panel the green curve represents the minus potential energy. In effect the potential energy curve has been flipped upside down. That way you can see directly that when the trial trajectory coincides with the true trajectory the red and green curve are parallel to each other everywhere.
(Any form of calculating the true trajectory uses the derivative of the potential energy. That is, in calculation the value of the potential energy itself is not used. Because of that the choice of zero point of potential energy is arbitrary.)
In the lower right subpanel:
The blue dot represents Hamilton's action.
The label of the horizontal axis is pv, which stands for 'variational parameter'. The positioning of the dots corresponds to the value of the main slider.
In the case of linear potential: when the trial trajectory coincides with the true trajectory the value of Hamilton's action is minimal/minimized. In the case implemented in this graphlet: any change of the trial trajectory results in raising the value of Hamilton's action.
3.2 Potential increases quadratic with displacement
Potential energy increases quadratic with displacement
Graphlet 3.2 is for the case where the force increases in linear proportion to the displacement. This case is commonly referred to as Hooke's law.
As we know: With Hooke's law the resulting motion is harmonic oscillation and the curve that represents the displacement as a function of time is the sine function.
With Hooke's law the potential energy increases with the square of the displacement. That is: with Hooke's law we have that the rate of change of potential energy is on par with that of the kinetic energy: with Hooke's law the expressions for the energies are both quadratic expressions.
As we know: with Hooke's law the amplitude and period of the resulting oscillation are independent from each other. Hamilton's stationary action corroborates that: when the trial trajectory is the harmonic oscillation function then if you change the amplitude the value of the action remains the same.
(In the diagram the actual curve is the cosine function; the point is that it is the harmonic oscillation function.)
3.3 Potential increases proportional to cube of displacement
Potential energy proportional to cube of displacement.
Graphlet 3.3 is for the case where the force increases proportional to the square of the displacement, hence the potential energy increases with the cube.
Click the button 'Show numerical' to show how the curve displayed in graphlet 6 was independently verified
Comparing the trajectories
In graphlet 3.1 the potential energy as a function of position is linear. Whenever the potential energy as a function of position is of lower order than the expression for the kinetic energy the action reaches a minimum when the derivative of the action is zero. In graphlet 3.2 the potential energy function and the kinetic energy function are both quadratic expressions, so the action is neither a minimum nor a maximum. Here in graphlet 3.3 the potential energy as a function of position is a higher order expression than the one for the kinetic energy (cubic versus quadratic), and consequently when the derivative of the action is zero the action reaches a maximum.
I recommend enlarging the graphlet to the full width of the browser window. Visibility of the navigation column of this page can be toggled. When the navigation column has been hidden: use the button 'Larger' and zoom in on the page as a whole to make the graphlet fill the entire width of the browser window.
How to operate the demonstration:
The graphlet set 3.1, 3.2, and 3.3 is designed to be discoverable, but for the sake of completeness I provide a description.
The main slider, located at the bottom of the graphlet, executes a global variation sweep. The value displayed in the "knob" of the main slider is a value to implement the variation, from here on I will refer to it as the 'variational parameter pv' In the 'integral' panel the variational parameter pv is along the horizontal axis.
Names for the 4 sub-panels:
- upper left: Control panel
- lower left: Height panel
- upper right: Energies panel
- lower right: Integrals panel
Note: The 3 sub-panels with a coordinate system are named after their vertical axis name: Height, Energy, Integral.
In the starting configuration the trajectory points (height panel) have been placed such that they coincide (to a very good approximation) with the true trajectory of the object.
When the object is moving along the true trajectory the rate of change of kinetic energy matches the rate of change of potential energy (work-energy theorem). This match of rate of change has been emphasized by turning the graph of the potential energy (green) upside down. When the object is moving along the true trajectory the red and green curve have the same slope along the entire trajectory.
The energies panel is where it happens. The energies panel represents how the equation that you are using solves for the true trajectory.
Hamilton's Action
Hamilton's Action is represented by the blue dot in the Integrals panel. Use the main slider to sweep out variation. The blue dot follows a curve; it is a curve in variation space. The slope of that curve represents the derivative of Hamilton's Action with respect to variation.
At the point where over the entire trajectory the derivative of the kinetic energy is equal to the derivative of the minus potential energy the derivative of the blue dot is zero.
In the control panel the two sliders on the far left are adjusters for the trajectory. The upper adjuster morphs the trajectory towards a curve that is more blunt than the true trajectory; the lower adjuster morphs the trajectory towards a triangle shape.
These adjusters allow morphing of the trial trajectory while maintaining that during the entire ascent the velocity never reverses from decreasing to increasing again, which would be unphysical.
The row of ten sliders is for adjustment of individual nodes. The three radio buttons toggle between three sets of node adjusting sliders.
The '× 1' button: for a ratio of 1-to-1 of moving the slider and movement of the corresponding node of the trajectory.
The '× 0.1' button: ratio of 10 to 1
The '× 0.01' button: ratio of 100 to 1, for fine adjustment.
The button 'Consolidate':
Clicking the button 'Consolidate' does the following: the current value of the '× 0.1' slider is transferred to the '× 1' slider. That is: after clicking the button 'Consolidate' the position of the '× 0.1' slider is reset to its zero position, and the '× 1' slider has been incremented accordingly.
In the energies panel: the grey point is draggable, and it drags the entire curve of the kinetic energy (red) with it. By shifting the kinetic energy curve over to the potential energy curve the user can verify that the red and green curve are parallel to each other along the entire trajectory. (The evaluation of the integral uses the unshifted position of the kinetic energy curve.)
In the integrals panel:
· Red/Green point: value of the integral of the red/green curve of the energies panel
· Blue point: the sum of the values of the red point and the green point
Finding the true trajectory by adjusting the sliders
As a seed move the '× 1' sliders so that the nodes are positioned along a straight line, say at 45 degrees.
In the 'Energies' subpanel, move the graph of the kinetic energy (red dots) down, on average a bit below the potential energy graph (green dots)
Use the '× 0.1' sliders to move the nodes upward bringing the red dots and green dots into alignment.
The true trajectory has the property that the rate of change of kinetic energy matches the rate of change of potential energy, so you want to make those two curves parallel to each other.
Appendix I: The meaning of 'stationary'
At the x-coordinate where the red and green curve have equal slope the blue curve is at zero slope.
Red and green are both ascending functions. We want to identify the coordinate where the rate of change of the red value matches the rate of change of the green value. The shortest way to get there is by setting up an equation with the derivative of the red curve on one side and the derivative of the green curve on the other side.
In the case of Hamilton's stationary action the same comparison is performed, but in a form that takes more steps. We see the following: a third function is defined, which is called the Lagrangian L: L=(Ek-Ep), and the point to be identified is called the point of 'stationary action'. 'Stationary action' is another way of saying: identify the point where the derivative of the Lagrangian is zero.
Summerizing:
Hamilton's stationary action works by imposing the constraint that was established with (1.11): the rate of change of kinetic energy must match the rate of change of potential energy.
Appendix II: Jacob's Lemma
When Johann Bernoulli had presented the Brachistochrone problem to the mathematicians of the time Jacob Bernoulli was among the few who was able to find the solution independently. The treatment by Jacob Bernoulli is in the Acta Eruditorum, May 1697, pp. 211-217
Jacob opens his treatment with an observation concerning the fact that the curve that is sought is a minimum curve.
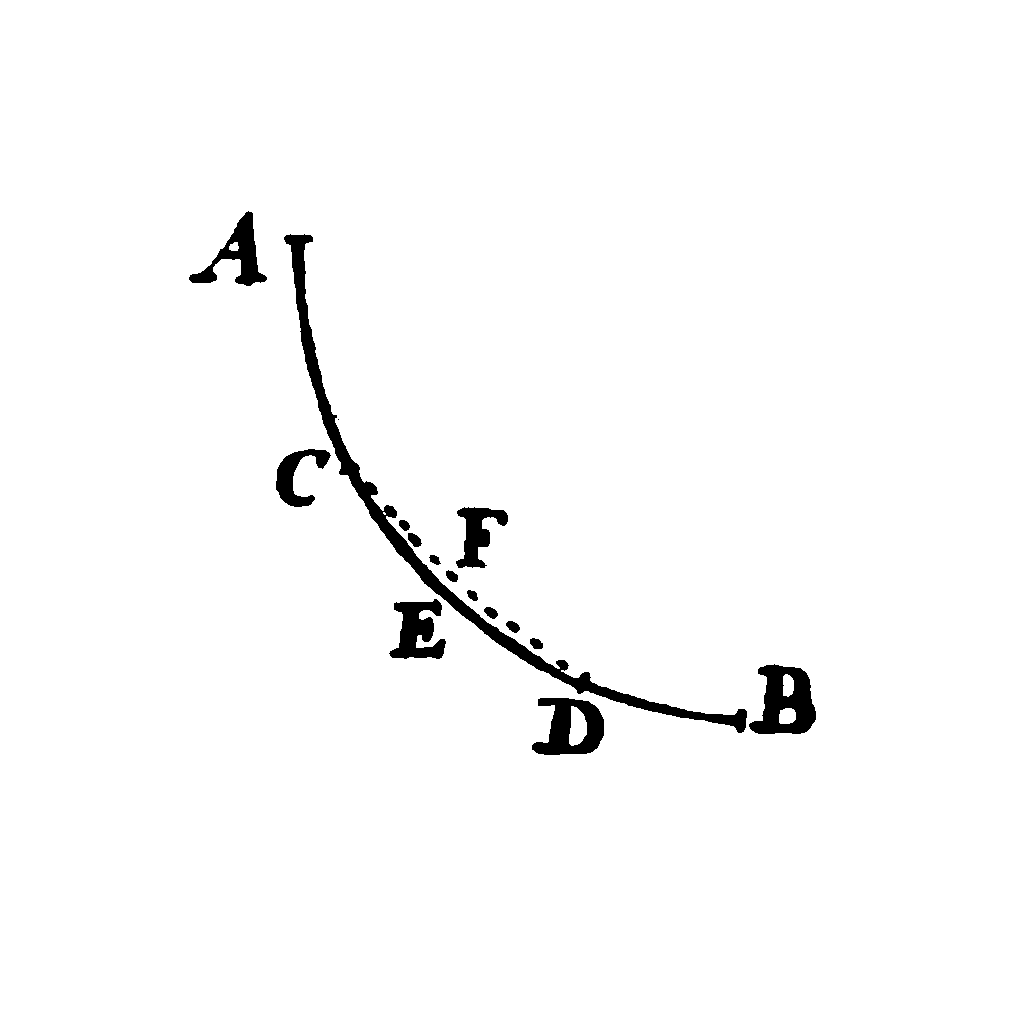
Lemma. Let ACEDB be the desired curve along which a heavy point falls from A to B in the shortest time, and let C and D be two points on it as close together as we like. Then the segment of arc CED is among all segments of arc with C and D as end points the segment that a heavy point falling from A traverses in the shortest time. Indeed, if another segment of arc CFD were traversed in a shorter time, then the point would move along ACFDB in a shorter time than along ACEDB, which is contrary to our supposition.
Jacob's lemma generalizes to all cases where the curve that you want to find is an extremum; either a maximum or a minimum. If the evaluation is an extremum for the entire curve, then it is also an extremum for any sub-section of the curve, down to infinitesimally short subsections.
The interactive diagrams on this page are created with the Javascript Library JSXGraph. JSXGraph is developed at the Lehrstuhl für Mathematik und ihre Didaktik, University of Bayreuth, Germany.

This work is licensed under a Creative Commons Attribution-ShareAlike 3.0 Unported License.
Last time this page was modified: June 06 2026